Už je to nějaká doba, co jsem naposled pracoval na nějakém hardwarovém projektu. Navíc již dlouho jsem nosil v hlavě myšlenku postavit vlastní gimbal. Když v tom jsem náhodou narazil na někoho, kdo prodával 3 motory ke gimbalu za dobrou cenu. A to byl ten potřebný impus k tomu, abych se pustil do práce. Koupil jsem tyto motorky a začal studovat co vše je potřeba k řízení takového gimbalu.
Jako řídící elektroniku jsem pořídil malou ale velmi profesionální desku SimpleBGC 32bit Tiny. Je sice dražší, ale v ceně jsem dostal moderní kontroler řízený relativně výkonným 32 bitovým procesorem, IMU senzor na rám gimbalu, firmware a software k aktualizaci, konfiguraci a kalibraci firmwaru. Nejlepší na na tom je, že tento podpůrný software běží i na Linuxu. Samozřejmě deska je kompatibilní s dříve koupenými motorky.
Poté jsem musel vyřešit, jakou koupit baterii. Kontroler může být napájený napětím od 3.7V do 25V. Motory nejsou příliš žravé, a tak jediné co limituje výběr baterie je kapacita a velikost. To znamená že mohu koupit baterii s největší kapacitou a ještě se vejde se do rámu. S tímhle na paměti jsem začal navrhovat rám.
Návrh rámu
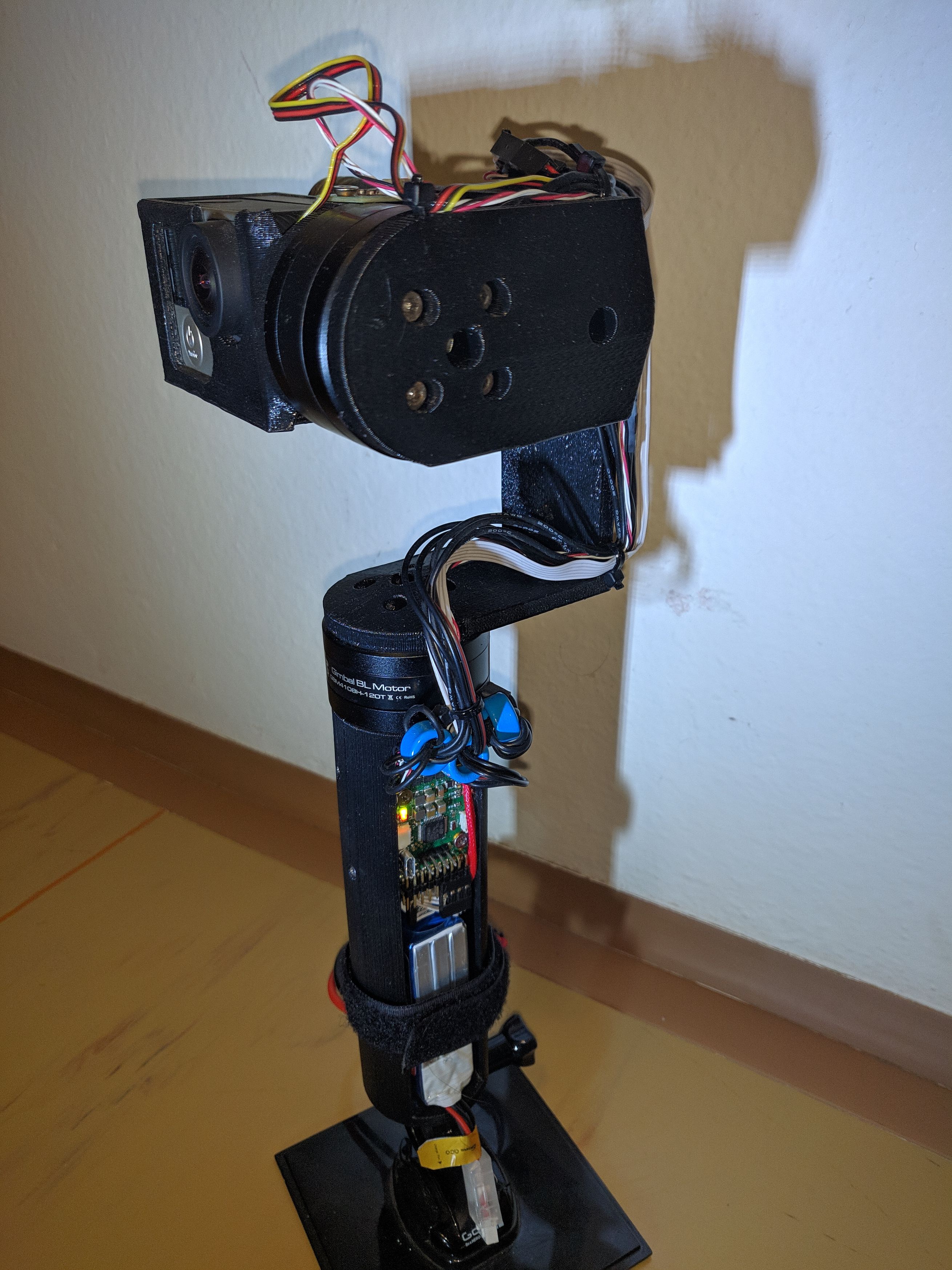
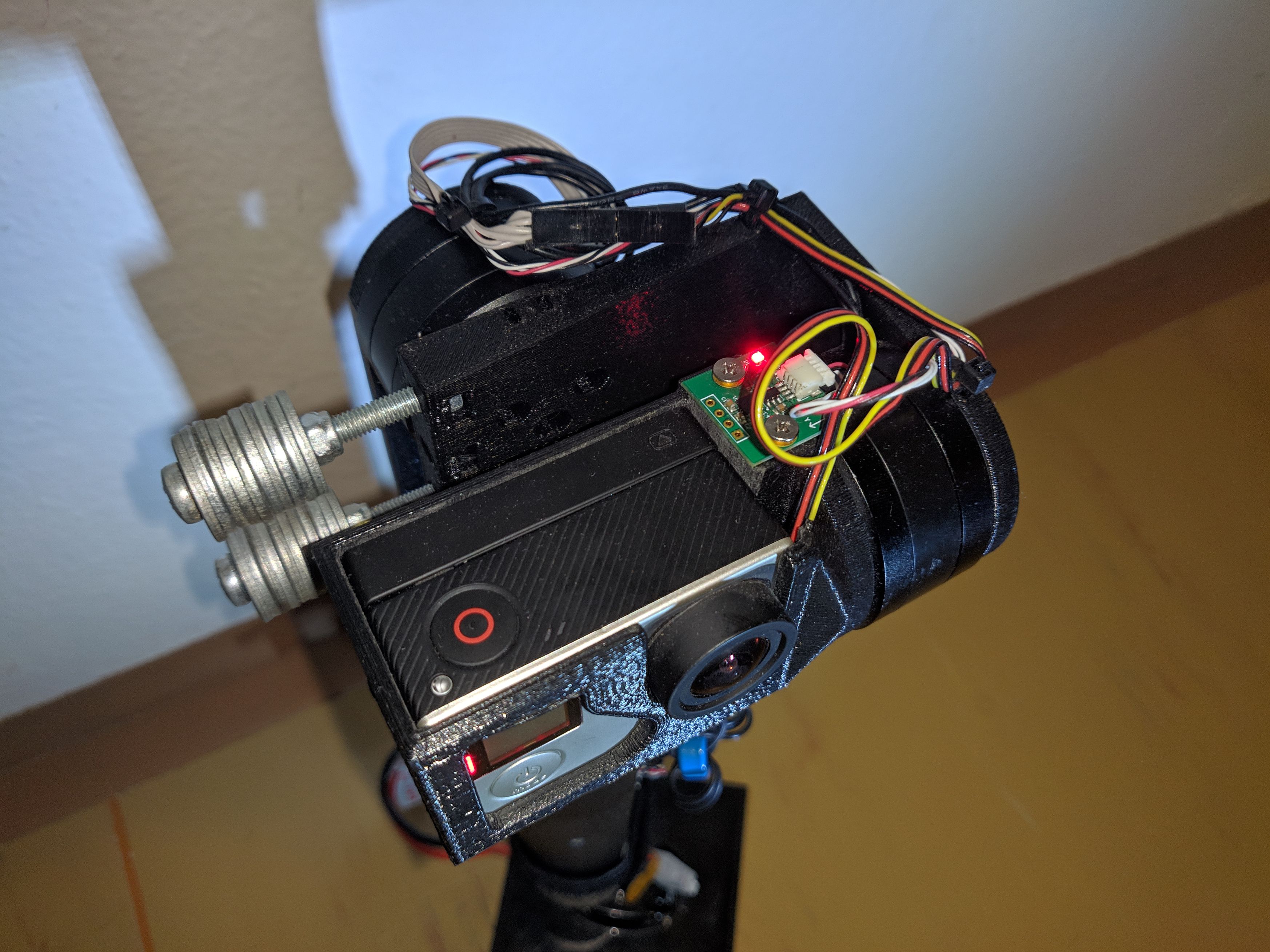
Rozměry rámu se odvíjejí od velikosti motorů. Začal jsem s uchycením kamery. Na serveru ThingiVerse jsem našel Gopro Hero 3/4 Gimbal, Gimbal určený k uchycení na dron. Využil jsem jejich uchycení gopro kamery, jen jsem jej rozšířil, aby do něj pasovala kamera i s rozšiřujícím displejem. Dále jsem do zadní části vyřízl průhled pro displej a nahradil jejich uchycení k motoru vlastním řešením pro můj větší motor. Nakonec jsem na vrchu přidal plochu pro uchycení IMU senzoru a vedle ní vyřízl žlab pro vedení nabíjecího kabelu.
Jako další jsem vytvořil konzolu ve tvaru L, která spojuje pitch a roll motor a pak další podobně tvarovanou konzolu ale s delšími rameny, spojující motory roll a yaw. Průřez těchto konzol jsem pro větší tuhost navrhl trojúhelníkový. Konzoly jsem opatřil několika otvory pro uchycení kabeláže pomocí zip pásků. Důraz jsem kladl i na vyvážení celé konstrukce, protože vyvážené osy gimbalu šetří potřebnou energii a tedy prodlužují výdrž na baterii. Na roll konci pitch-roll konzole jsem přidal uchycení pro vyvažovací závaží v podobě šroubů. Přidáním správného množství podložek na tyto šrouby lze vyvážit roll osu. Druhá konzola je také vyvážená, zde jsem použil metodu pokus a omyl. Vytiskl jsem konzolu v několika délkách a vybral tu, která je nejlépe vyvážená.
S rukojetí to bylo složitější. Už jen kritéria: Rukojeť musí být tak malá, aby se pohodlně držela v ruce, tak pevná, aby unesla zbytek gimbalu, a tak velká, aby schovala řídící elektroniku, baterii a joystick. Komponenty musí být uvnitř poskládány tak, aby baterie šla snadno vyměnit a joystick byl na dosažitelném místě. Výsledný design navíc musí být možné vytisknout mou tiskárnou, což znamená limitaci na velikost výsledného tisku a kvůli pevnosti na orientaci rukojeti při tisku. K tomu jsem se snažil ještě snažil omezit potřebu podpor při tisku na minimum, úplně bez podpor to nakonec nešlo. Alespoň ne s tímto návrhem.
Výsledkem tedy je rukojeť, která má tvar válce o stejném průměru jako motor. Výška rukojeti je dána velikostí mé tiskové desky. Tisknul jsem ji ležmo a úhlopříčně, s podporami na první centimetr výšky a s nastavenou velmi nízkou hodnotou převisů.
V tomto válci je v téměř celé výšce vykrojený naskrz otvor o šířce řídící elektroniky. Na horní straně rukojeti jsou otvory pro šrouby nesoucí motor. Motor se musí připevnit jako první, protože se šrouby šroubují z toho výřezu.
Poté se do horní části výřezu vsadí můstek, další část rukojeti, taktéž vytištěná a speciálně tvarovaná do této pozice. Můstek se uchytí dvěma vruty z každého boku rukojeti. Nad můstkem vznikne prostor pro vedení kabeláže, navíc je horní strana výřezu skosená, což také pomáhá s vedením kabeláže. Na můstek se z jedné strany přišroubuje řídící elektronika a z druhé joystick.
Pod můstkem tak vznikne prostor, který je celý určen jen pro baterii. Jako poslední jsem na spodní stranu rukojeti jsem přidal úchyt ve tvaru standardního uchycení gopro kamer. Gimbal tak lze připevnit ke všemu co podporuje gopro. Úchyt jsem nemodeloval sám, ale opět jsem si našel na serveru ThingiVerse GoPro Frame, který vhodným úchytem již disponoval.
Kalibrace
Pokračování příště...