It's a while I last did some hardware project and I had an idea of building a gimbal in my head for some time now. And suddenly I discovered somebody who was selling brushless gimbal motors for cheap. That was the first impuls. I ordered these motors and started to study what is needed to control the gimbal and started to design the construction.
As a main controller board I ordered small, but highly professional gimbal controller SimpleBGC 32bit Tiny. It is a bit more expensive, but for the price you get a modern controller driven by relatively powerfull 32 bit processor, a frame IMU sensor, and you get a controller firmware together with a software tool for calibrating , configuring and even updateing the firmware. And the best part, this software also runs on Linux. And also it is of course capable of running those ordered motors.
Then I had to figure out, which battery to buy. The controller can be powered by anything between 3.7V and 25V. Motors are not much power hungry, so the size and the capacity are only parameters limiting my choice. That means I can buy battery with highest capacity and wich fits to the frame. With this in mind i started to do the design of the frame.
Frame design
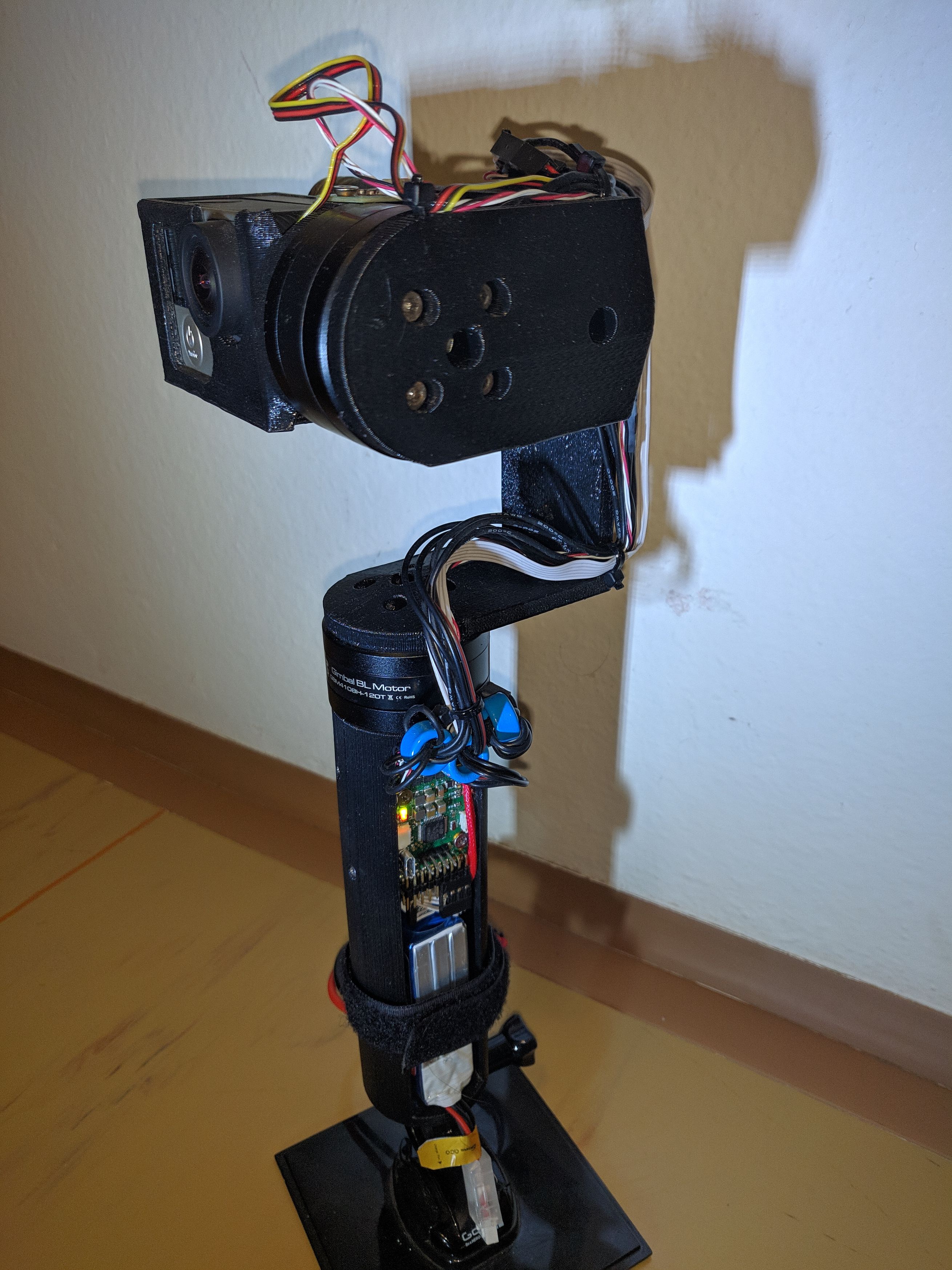
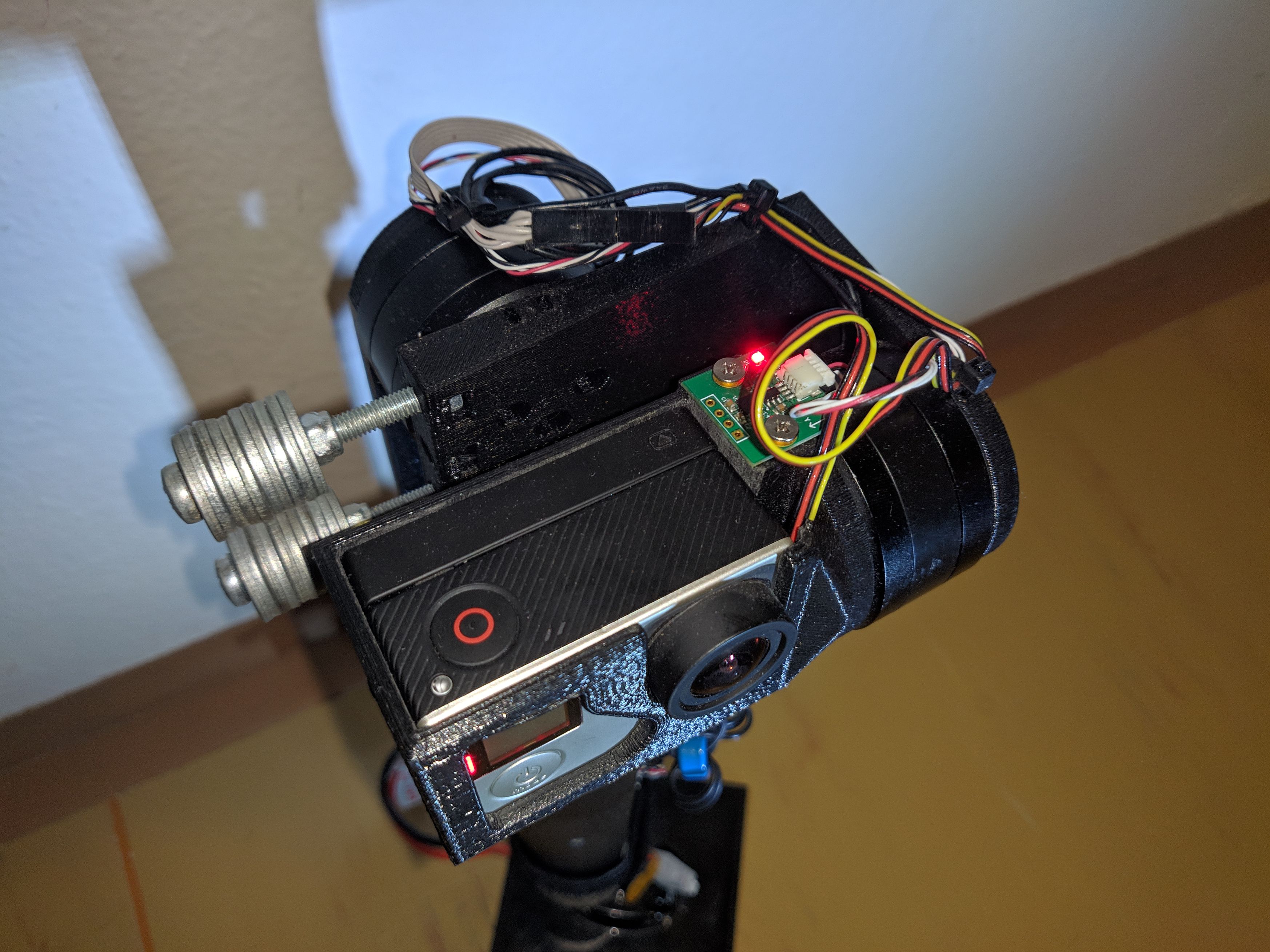
Frame dimesions are derived from size of motors. I started with the camera mount. On the ThingiVerse server I found a Gopro Hero 3/4 Gimbal meant to be used on 3D printed dron. I took their camera mount piece, made it wider, so that my camera with display backpack can fit in it. Then I cut a display window on the rear side, and replaced the motor mounting part by my custom design. On top i made a pad for mounting IMU sensor and next to it I created a channel for charging cable.
Then I created an L shaped bracket connecting pitch and roll motor and another similar shaped bracket, but with longer arms, connecting roll and yaw motor. I used a triangular crossectial shape to ad some rigidity. These brackets have several holes for mounting cables to the frame by zip ties. I also tried to make gimbal weight balanced, because balanced gimbal axises save energy and thus prolongs battery live. On the roll end of the pitch-roll connecting bracket there are mounting holes for weight balancing screws. By adding weight balast here I can equalize the weight on both sides of the roll axis. The second bracket is also balanced, here I used a trial and error method. I printed several brackets with different lengths and selected the one that is most balanced.
To be continued...